
If they build it, we will go – for the long-term.
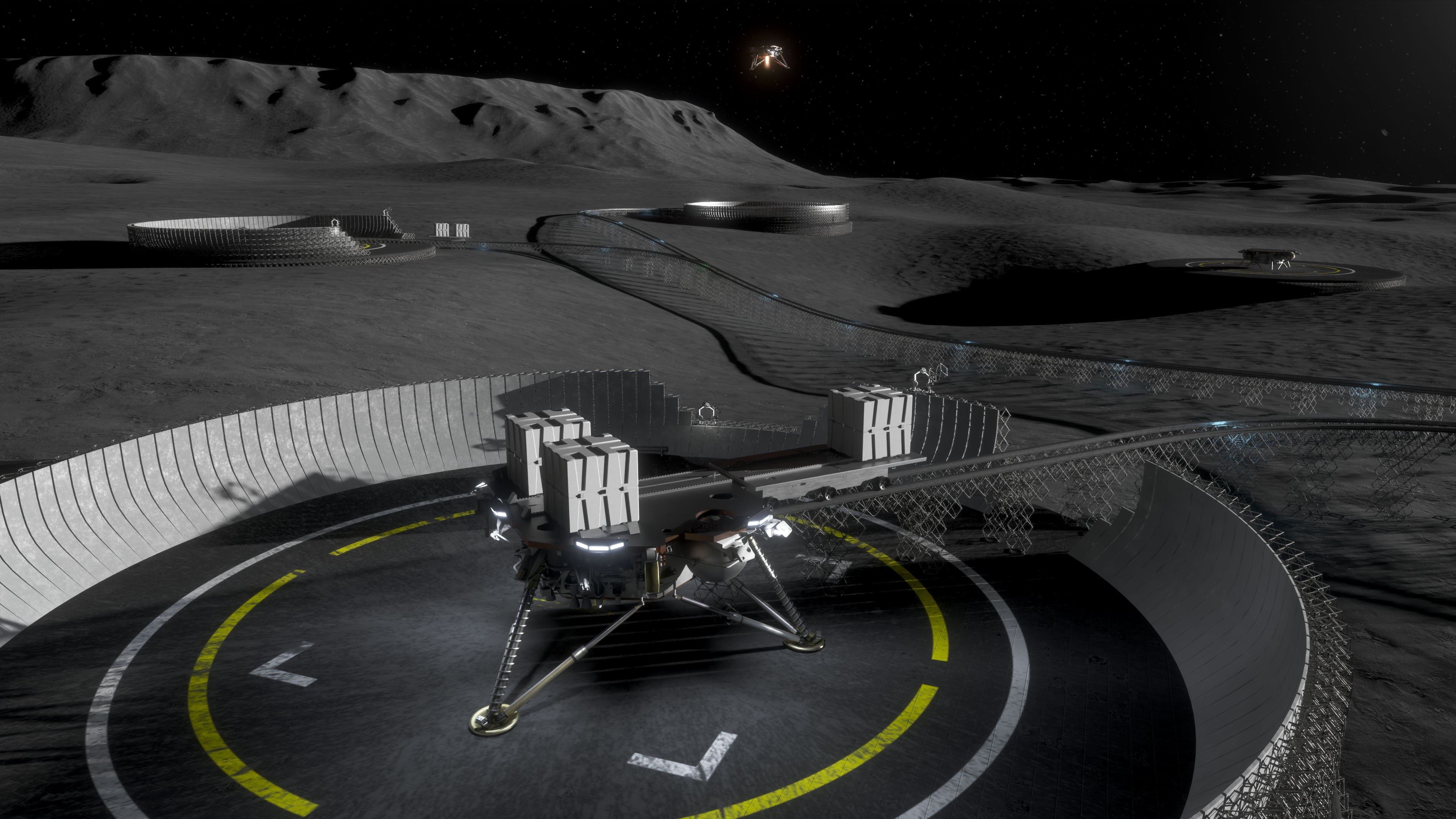
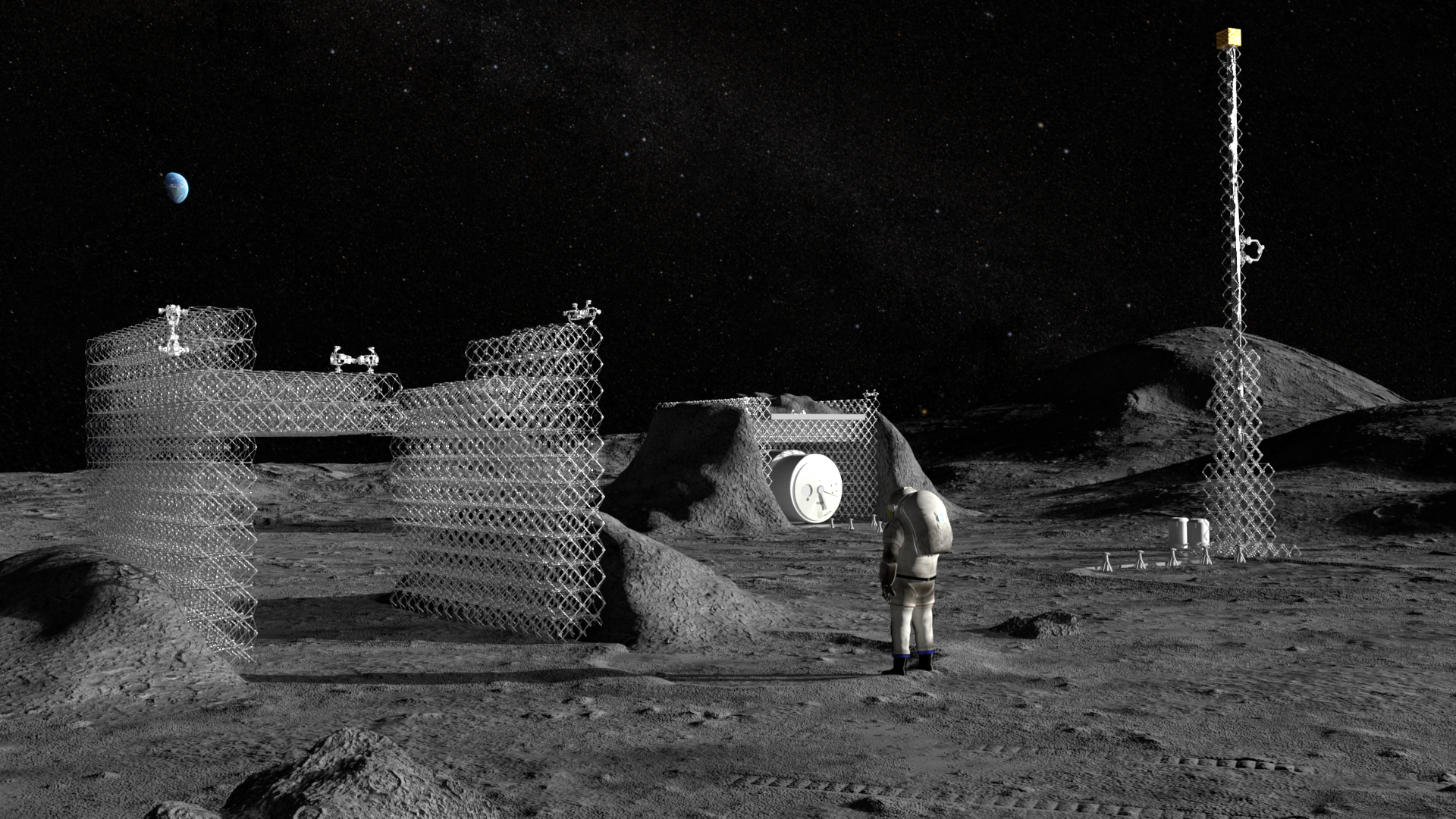
Future long-duration and deep-space exploration missions to the Moon, Mars, and beyond will require a way to build large-scale infrastructure, such as solar power stations, communications towers, and habitats for crew. To sustain a long-term presence in deep space, NASA needs the capability to construct and maintain these systems in place, rather than sending large pre-assembled hardware from Earth.
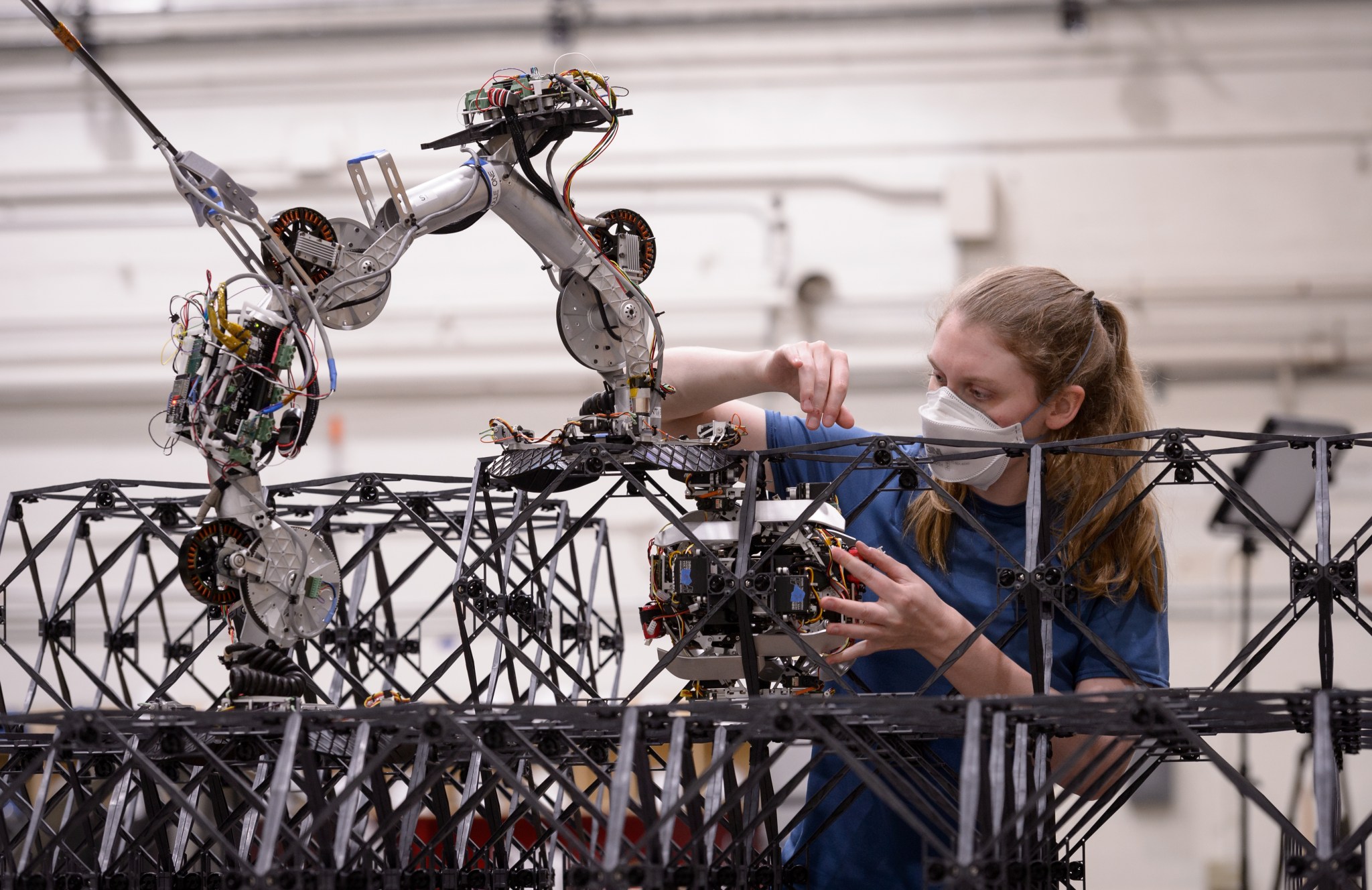
NASA’s Automated Reconfigurable Mission Adaptive Digital Assembly Systems (ARMADAS) team is developing a hardware and software system to meet that need. The system uses different types of inchworm-like robots that can assemble, repair, and reconfigure structural materials for a variety of large-scale hardware systems in space. The robots can do their jobs in orbit, on the lunar surface, or on other planets – even before humans arrive.
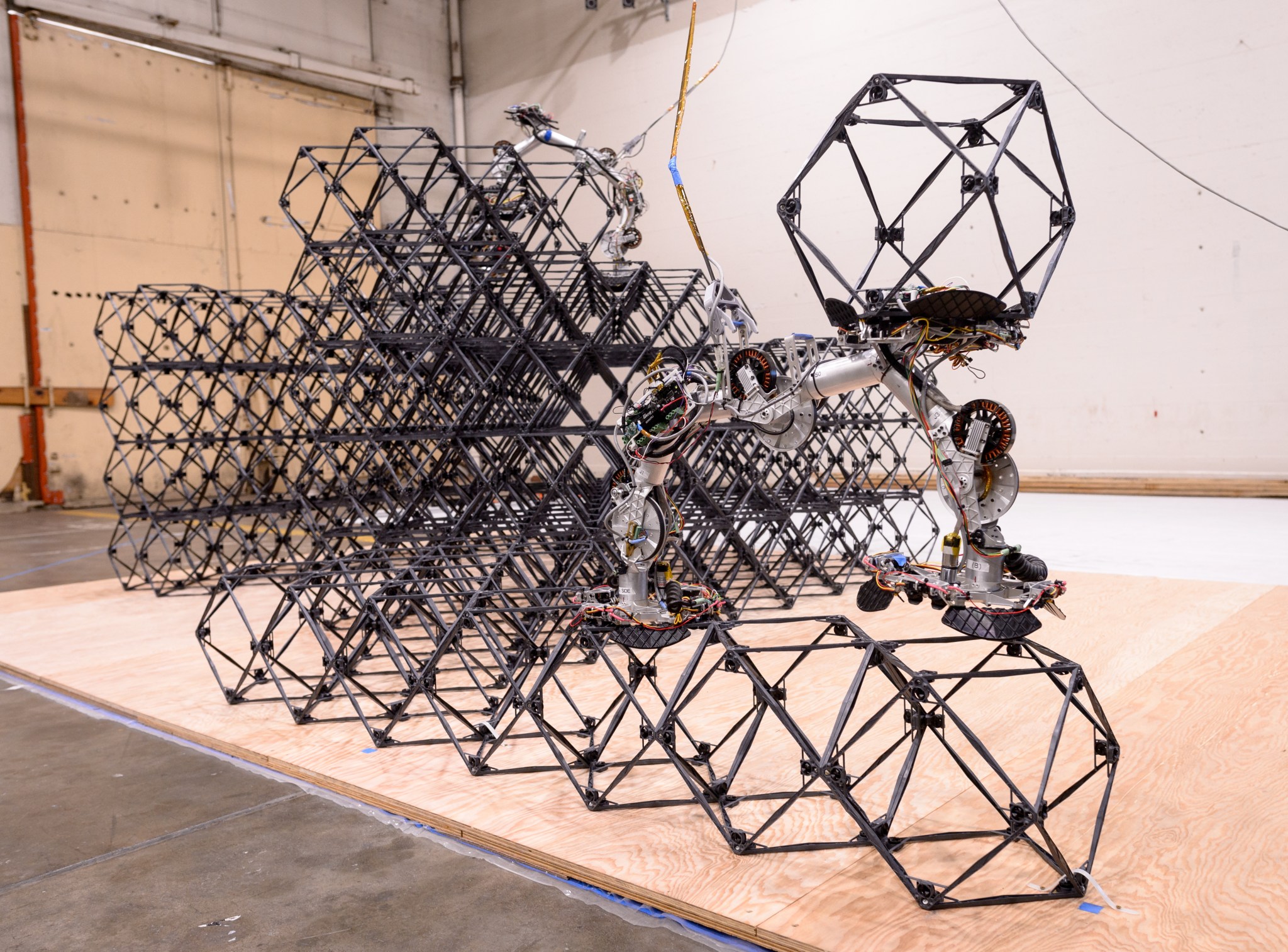
Researchers at NASA’s Ames Research Center in California’s Silicon Valley recently performed a laboratory demonstration of the ARMADAS technology and analyzed the system’s performance. During the tests, three robots worked autonomously as a team to build a meters-scale shelter structure – roughly the size of a shed – using hundreds of building blocks. The team published their results today in Science Robotics.
“The ground assembly experiment demonstrated crucial parts of the system: the scalability and reliability of the robots, and the performance of structures they build. This type of test is key for maturing the technology for space applications,” said Christine Gregg, ARMADAS chief engineer at NASA Ames.
The high strength, stiffness, and low mass of the structural product is comparable to today’s highest-performance structures, like long bridges, aircraft wings, and space structures – such as the International Space Station’s trusses. Such performance is a giant leap for the field of robotically reconfigurable structures.
Programmable, Reconfigurable Structures
“‘Mission adaptive’ capabilities allow a system to be reused for multiple purposes, including ones that adopt hardware from completed activities, decreasing the cost of new missions,” said Kenny Cheung, ARMADAS principal investigator at NASA Ames. “‘Digital assembly systems’ refers to the use of discrete building blocks, as a physical analog to the digital systems that we use today.”
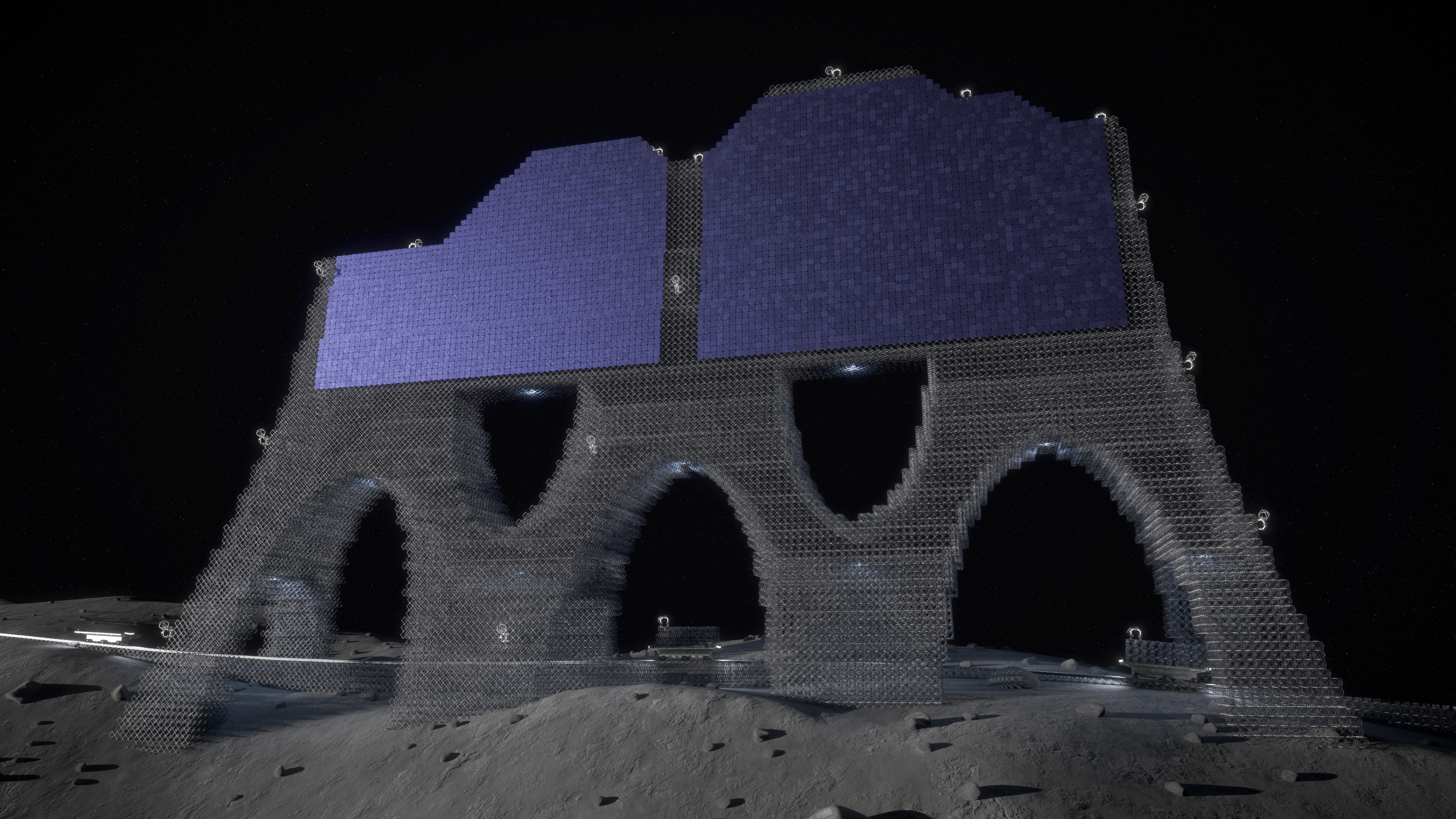
Many people use digital systems to view photos or text on a display, like a smartphone screen. A digital image uses a small set of pixel types to form almost any image on a high-resolution display. You can think of pixels as building blocks for 2D space. The ARMADAS system can use a small set of 3D building blocks – called voxels, short for volumetric pixels – to form almost any structure. Just like digital images, the ARMADAS system is ‘programmable,’ meaning that it can self-reconfigure to meet evolving needs, with the help of the robots.
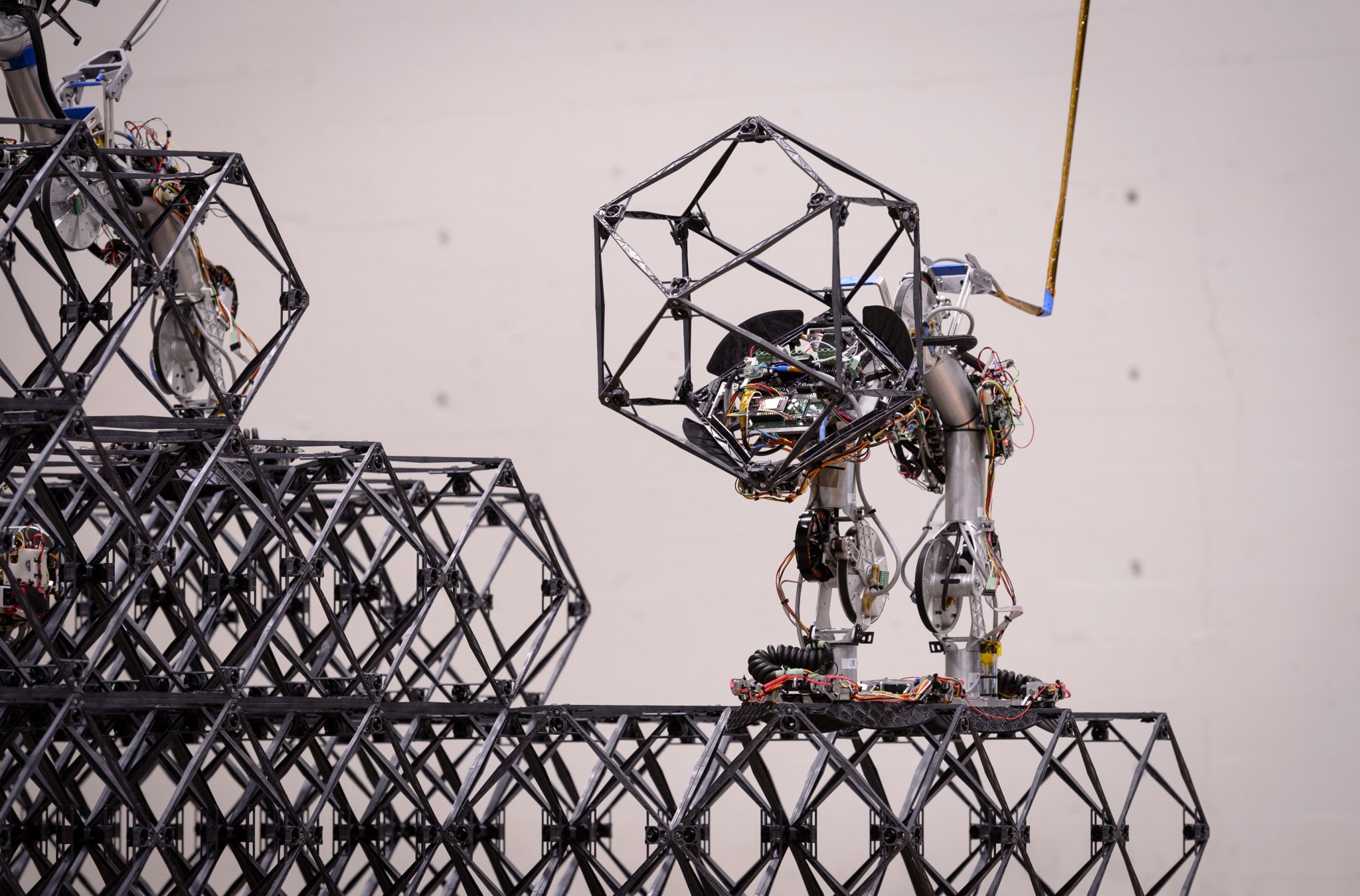
The voxels used in the demonstration were made of strong and lightweight composite materials formed into a shape called a cuboctahedron. The voxels resemble a wire-frame soccer ball with flat faces and highly precise geometry.
“It’s surprising how strong and stiff these systems are, given how they look,” said Cheung. “Making large structures from small building blocks allows us to use good materials at the lowest cost. The size of the structures that can be made is only limited by the number of building blocks that can be supplied.”
This kind of scalability is revolutionary in comparison to current methods of fabricating spacecraft in factories, or even 3D printing.
A Reliable System Relies on Building Blocks
Building blocks are also key to the robotic system autonomy and reliability.
“Generally, it’s very hard to develop robust autonomous robots that can operate in unstructured environments, like a typical construction site. We turn that problem on its head by making very simple and reliable robots that operate in an extremely structured lattice environment,” said Gregg.
For the demonstration, the ARMADAS team provided plans for the structure, but they didn’t micromanage the robots’ work. Software algorithms did the job of planning the robots’ tasks. The system practiced the build sequence in simulation before the actual run started.
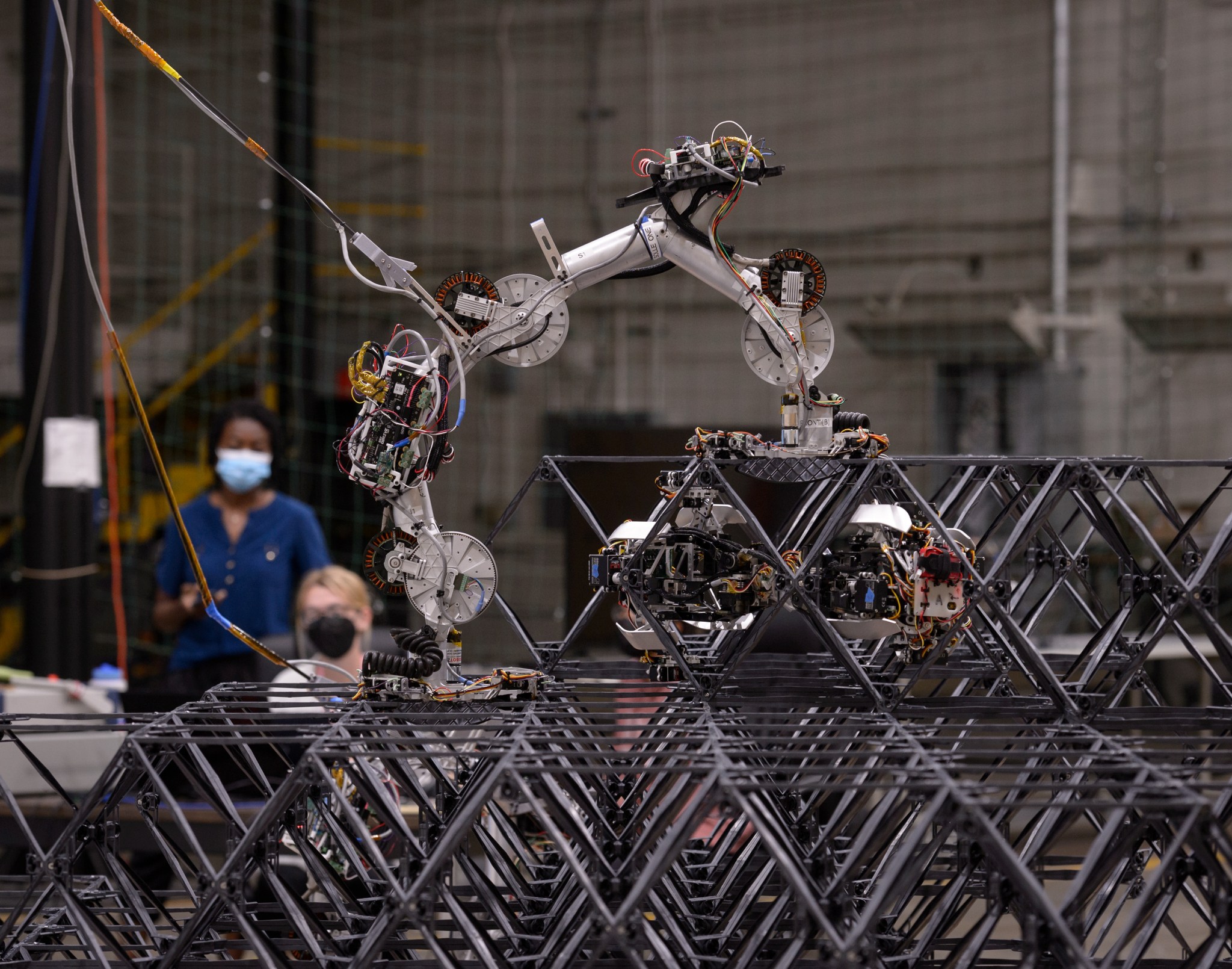
While in operation, two robots – stepping inchworm style – walked on the exterior of the structure, moving one soccer ball-sized voxel at a time. One robot fetched the voxels from a supply station and passed them to the second robot that, in turn, placed each voxel on its target location.
A third robot followed these placements, climbing though the interior space of the voxels and bolting each new voxel to the rest of the structure.
“Because the robots align each small step to the structure in what is essentially a 3D grid, simple algorithms with low computation and sensing requirements can achieve high-level autonomy goals. The system builds and error-corrects on its own with no machine vision or external means of measurement,” said Gregg.
Future work will expand the library of voxel types that the robots work with, to include solar panels, electrical connections, shielding, and more. Each new module type will dramatically expand the possible applications because the robots can mix and match them to meet specific needs and locations. The ARMADAS team is also working on new robot capabilities, such as inspection tools, to ensure that autonomously constructed facilities are safe and sound before astronauts arrive.
ARMADAS’ technology approach increases what we can do with equipment sent for most deep space exploration missions, and how long we can use them. When a mission completes, robots can disassemble space structures, repurpose the building blocks, and construct designs of the future.

For news media:
Members of the news media interested in covering this topic should reach out to the NASA Ames newsroom.
from NASA https://ift.tt/Wx16Ze2

No comments:
Post a Comment