NASA Announces Winners of Inaugural Human Lander Challenge
NASA’s 2024 Human Lander Challenge (HuLC) Forum brought 12 university teams from across the United States to Huntsville, Alabama, near the agency’s Marshall Space Flight Center, to showcase their innovative concepts for addressing the complex issue of managing lunar dust. The 12 finalists, selected in March 2024, presented their final presentations to a panel of NASA and industry experts from NASA’s Human Landing Systems Program at the HuLC Forum in Huntsville June 25-27.
NASA’s lunar exploration campaign Artemis is working to send the first woman, first person of color, and first international partner astronaut to the Moon and establish long-term lunar science and exploration capabilities. Dust mitigation during landing is one of the key challenges NASA and its Artemis partners will have to address in exploring the lunar South Pole region and establishing a long-term human presence on the Moon. Participants in the 2024 Human Lander Challenge developed proposed systems-level solutions that could be potentially implemented within the next 3-5 years to manage or prevent clouds of dust – called lunar plume surface interaction – that form as a spacecraft touches down on the Moon.
NASA announced the University of Michigan team, with their project titled, “ARC-LIGHT: Algorithm for Robust Characterization of Lunar Surface Imaging for Ground Hazards and Trajectory” as the selected overall winner and recipient of a $10,000 award June 27.
12 university teams gathered in Huntsville, Alabama, near NASA’s Marshall Space Flight Center, June 25-27 to participate in the final round of NASA’s 2024 Human Lander Challenge (HuLC) Forum.
NASA/Ken Hall
The University of Illinois, Urbana-Champaign took second place and a $5,000 award with their project, “HINDER: Holistic Integration of Navigational Dynamics for Erosion Reduction,” followed by University of Colorado Boulder for their project, “Lunar Surface Assessment Tool (LSAT): A Simulation of Lunar Dust Dynamics for Risk Analysis,” and a $3,000 award.
“Managing and reducing the threat of lunar dust is a formidable challenge to NASA and we are committed to real solutions for our long long-term presence on the Moon’s surface,” said Don Krupp, associate program manager for the HLS Program at Marshall. “A key part of NASA’s mission is to build the next generation of explorers and expand our partnerships across commercial industry and the academic community to advance HLS technologies, concepts, and approaches. The Human Lander Challenge is a great example of our unique partnership with the academic community as they help provide innovative and real solutions to the unique risks and challenges of returning to the Moon.”
Two teams received the excellence in systems engineering award:
Texas A&M University, “Synthetic Orbital Landing Area for Crater Elimination (SOLACE)
Embry-Riddle Aeronautical University, Prescott, “Plume Additive for Reducing Surface Ejecta and Cratering (PARSEC)
NASA selected the University of Michigan as the overall winner of NASA’s 2024 Human Lander Challenge (HuLC) Forum June 27.
NASA/Ken Hall
“The caliber of solutions presented by the finalist teams to address the challenges of lunar-plume surface interaction is truly commendable,” said Esther Lee, HuLC judging panel chair and aerospace engineer at NASA’s Langley Research Center in Hampton, Virginia. “Witnessing the development of these concepts is an exciting glimpse into the promising future of aerospace leadership. It’s inspiring to see so many brilliant minds coming together to solve the challenges of lunar landings and exploration. We may all come from different educational backgrounds, but our shared passion for space unites us.”
Student and faculty advisor participants had the opportunity to network and interact with NASA and industry subject matter experts who are actively working on NASA’s Human Landing System capabilities giving participants a unique insight to careers and operations that further the Agency’s mission of human space exploration.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
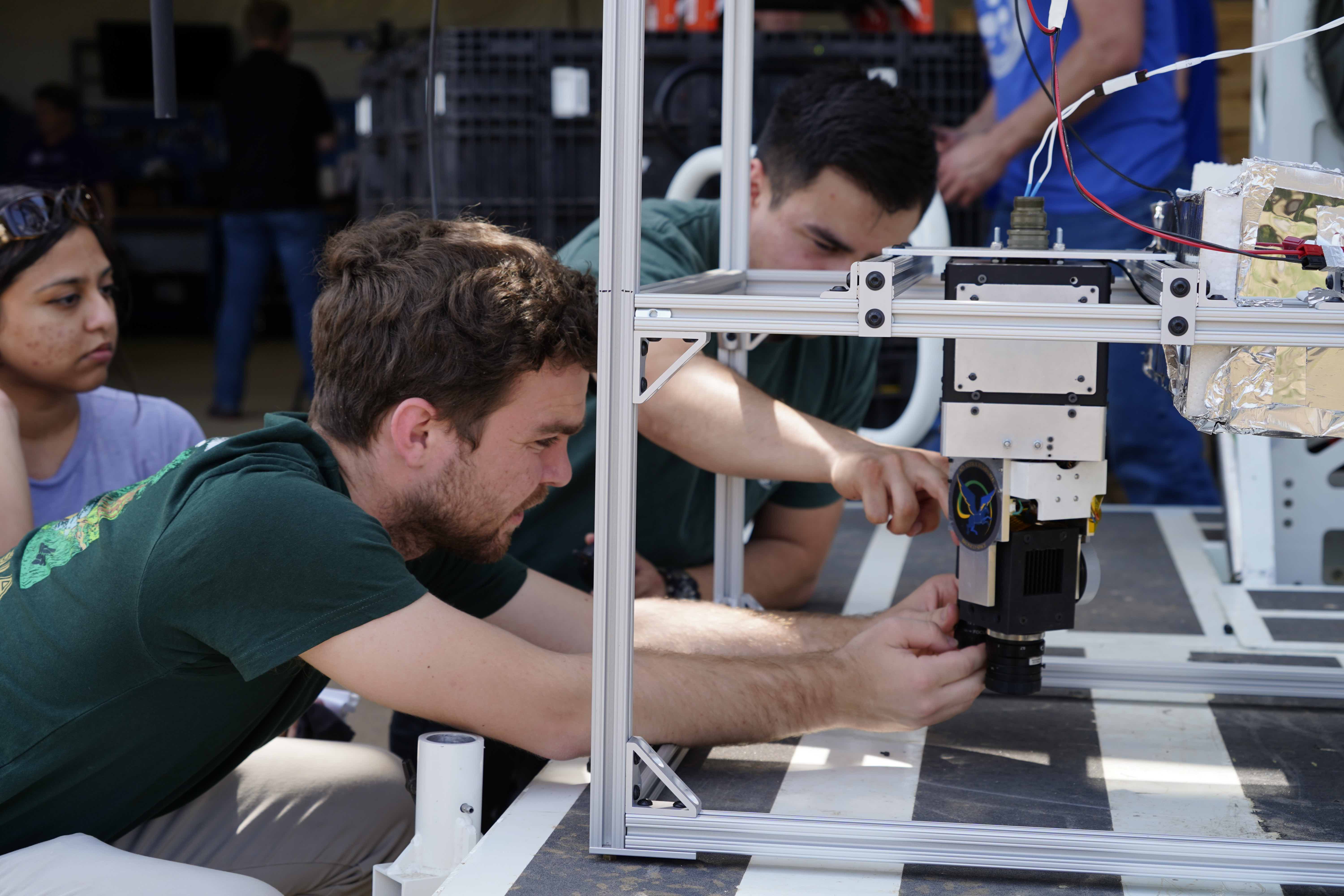
The Bronco Space team assembles its Bronco Ember technology, which uses a short-wave infrared camera with AI to improve early wildfire detection.
Credit: Bronco Space
NASA’s public competitions can catalyze big changes – not just for the agency but also for participants. Bronco Space, the CubeSat laboratory at California State Polytechnic University in Pomona, California, matured more than just space technology as a result of winning funds from NASA’s TechLeap Prize competition. It grew from its roots in a broom closet to a newly built lab on campus, expanding its capacity to mature space technologies long into the future.
The TechLeap Prize seeks to rapidly identify and develop space technologies through a series of challenges that each address a specific technology need for NASA and the nation. In addition to a cash prize, winners receive access to a suborbital or orbital flight opportunity on a commercial flight platform. Bronco Space won $500,000 in the inaugural TechLeap Prize, Autonomous Observation Challenge, launched in 2021. The challenge sought small spacecraft technologies that could autonomously detect, locate, track, and collect data on transient events on Earth and beyond. The team, made up of both undergraduate and graduate students, developed and launched a wildfire detection system called Bronco Ember, which used a short-wave infrared camera with AI (artificial intelligence) to improve early wildfire detection.
Zachary Gaines was an undergraduate student when he participated in the first challenge through TechLeap with Bronco Space. He has since graduated and now supervises the lab at Cal Poly Pomona. Gaines notes how the prize gave the team flexibility to invest in their lab and expand the university’s technology development and maturation capabilities.
“Because TechLeap gave us prize money rather than a grant, we had the freedom to invest those funds,” said Gaines. “If we want to make a real-world impact, which we always want to do, we needed a real lab with equipment. Thanks to TechLeap, we now have space in an innovation village right outside of campus.”
In 2022, Gaines was also involved in Bronco Space’s second time participating in TechLeap as part of the first Nighttime Precision Landing Challenge. The competition sought sensing systems to detect surface hazards from at least 250 meters high and process the data in real-time to generate a terrain map suitable for a spacecraft to land safely in the dark. As one of three winners eligible to receive up to $650,000 each, Bronco Space developed a system using a light projector to create an initial geometry map for landing. The system then uses LIDAR (light detection and ranging) along with advances in computer vision, machine learning, robotics, and computing to generate a map that reconstructs lunar terrain.
A demo of the 3D digital “twin” app created by PRISM Intelligence for NASA’s Entrepreneurs Challenge.
Credit: Bronco Space
From the experience with TechLeap, Gaines and other team members formed the small business Pegasus Intelligence and Space, now PRISM Intelligence, and participated in another challenge – NASA’s Entrepreneurs Challenge. This competition seeks the development and commercialization of lunar payloads and climate science through an entrepreneurial and venture lens to advance the Agency’s science exploration goals. The company’s technology, also called PRISM, is a 3D digital map of the world that uses AI to make the “twin” world searchable. The challenge encouraged Gaines and the PRISM team to bridge the gap between available data and consumer end-users. PRISM was a Round 2 winner of the challenge, receiving a share of the $1 million prize as well as exposure to external funders and investors.
Gaines traces the success of PRISM back to his first TechLeap experience: “The company wouldn’t have happened if we hadn’t done TechLeap. It helped me understand how to develop technologies for industry.”
The company and the university continue to secure NASA support. In December 2023, Cal Poly Pomona was selected to receive a two-year funded cooperative agreement through NASA’s University SmallSat Technology Partnership.
“When people invest in your ideas and continue to support them, they help you get smarter and increase your understanding of people’s needs,” said Gaines. “Building technologies with the goal of a real-world impact is really motivating.”
Members of Bronco Space developed a sensing system that generates a map for precise spacecraft landing as part of NASA’s second TechLeap competition.
Preparations for Next Moonwalk Simulations Underway (and Underwater)
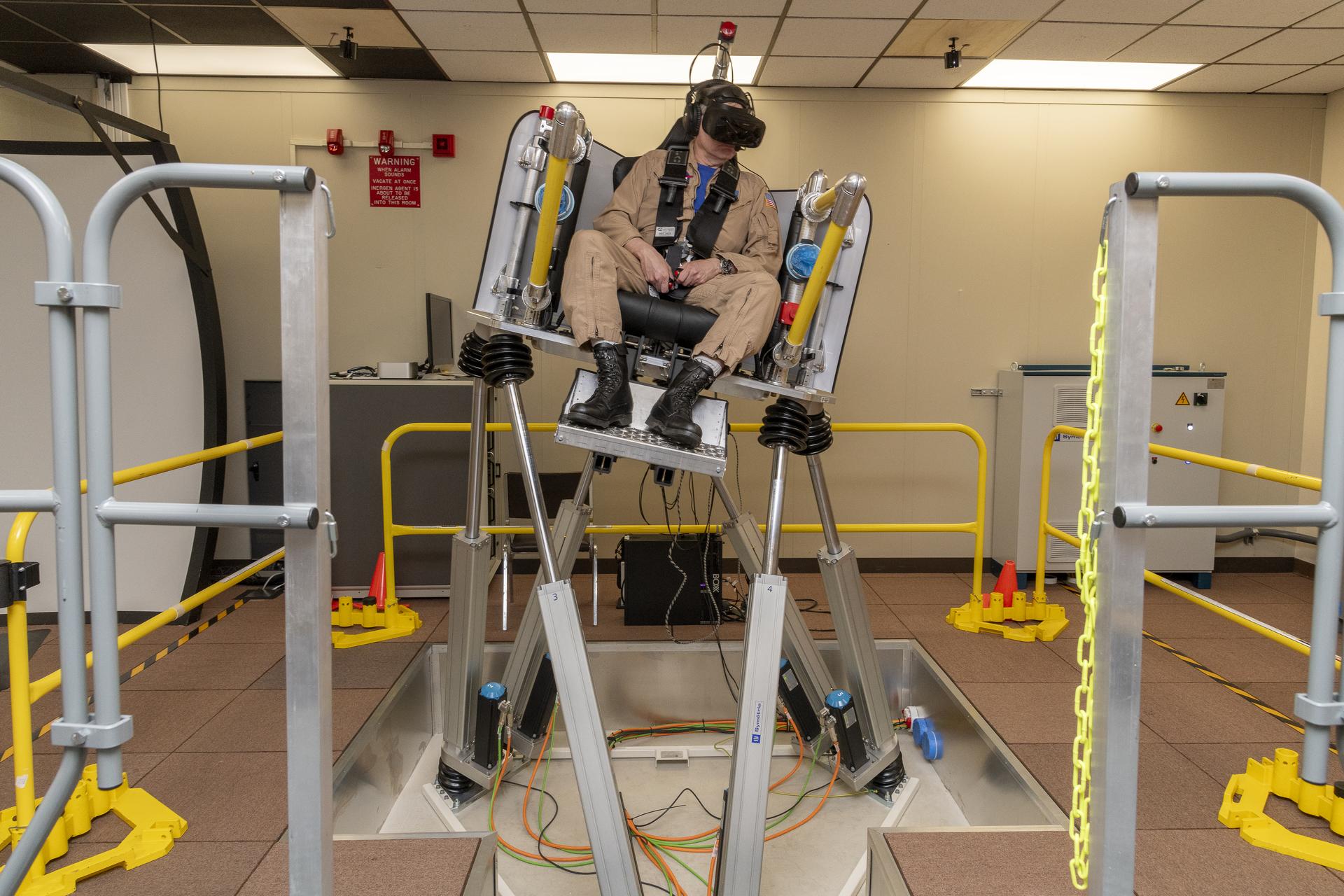
NASA test pilot Wayne Ringelberg sits in the air taxi virtual reality flight simulator during a test at NASA’s Armstrong Flight Research Center in Edwards, California, in March 2024.
NASA/Steve Freeman
A new custom virtual reality flight simulator built by NASA researchers will allow them to explore how passengers experience air taxi rides and collect data that will help designers create new aircraft with passenger comfort in mind.
Wayne Ringelberg, a test pilot at NASA’s Armstrong Flight Research Center in Edwards, California, recently completed a series of test rides in the new simulator to help the team make adjustments before other users are involved for the first research study later this year.
“This project is leveraging our research and test pilot aircrew with vertical lift experience to validate the safety and accuracy of the lab in preparation for test subject evaluations,” said Ringelberg. “The experiments in the ride quality lab will inform the advanced air mobility community about the acceptability of the motions these aircraft could make, so the general public is more likely to adopt the new technology.”
Ringelberg was secured into the seat on top of the simulator’s platform, wearing a virtual reality headset and headphones. His simulated air taxi ride started with a takeoff from a conceptual vertiport on top of a parking garage in downtown San Francisco, California, constructed by NASA engineers in the virtual world.
As the programed ride took him through downtown San Francisco and landed at another vertiport on top of a skyscraper, Ringelberg evaluated the realism and consistency of the simulation’s visual, motion, and audio cues. He then provided feedback to the research team.
NASA researchers Curt Hanson (background) and Saravanakumaar Ramia (foreground) control the air taxi virtual reality flight simulator from computers during a test at NASA’s Armstrong Flight Research Center in Edwards, California, in March 2024.
NASA/Steve Freeman
With pilot checkouts complete, NASA researchers will conduct a series of human subject research studies over the next four years. The goal is to gather information that will help the industry better understand what makes flying in an air taxi comfortable and enjoyable for customers.
This simulator is the centerpiece of NASA Armstrong’s virtual reality passenger ride quality laboratory. The laboratory combines virtual reality visuals, physical motion cues, and spatialized rotor sounds to create an immersive air taxi passenger experience.
Mapping the Red Planet with the Power of Open Science
This image of Perseverance’s backshell sitting upright on the surface of Jezero Crater was collected from an altitude of 26 feet (8 meters) by NASA’s Ingenuity Mars Helicopter during its 26th flight at Mars on April 19, 2022.
NASA/JPL-Caltech
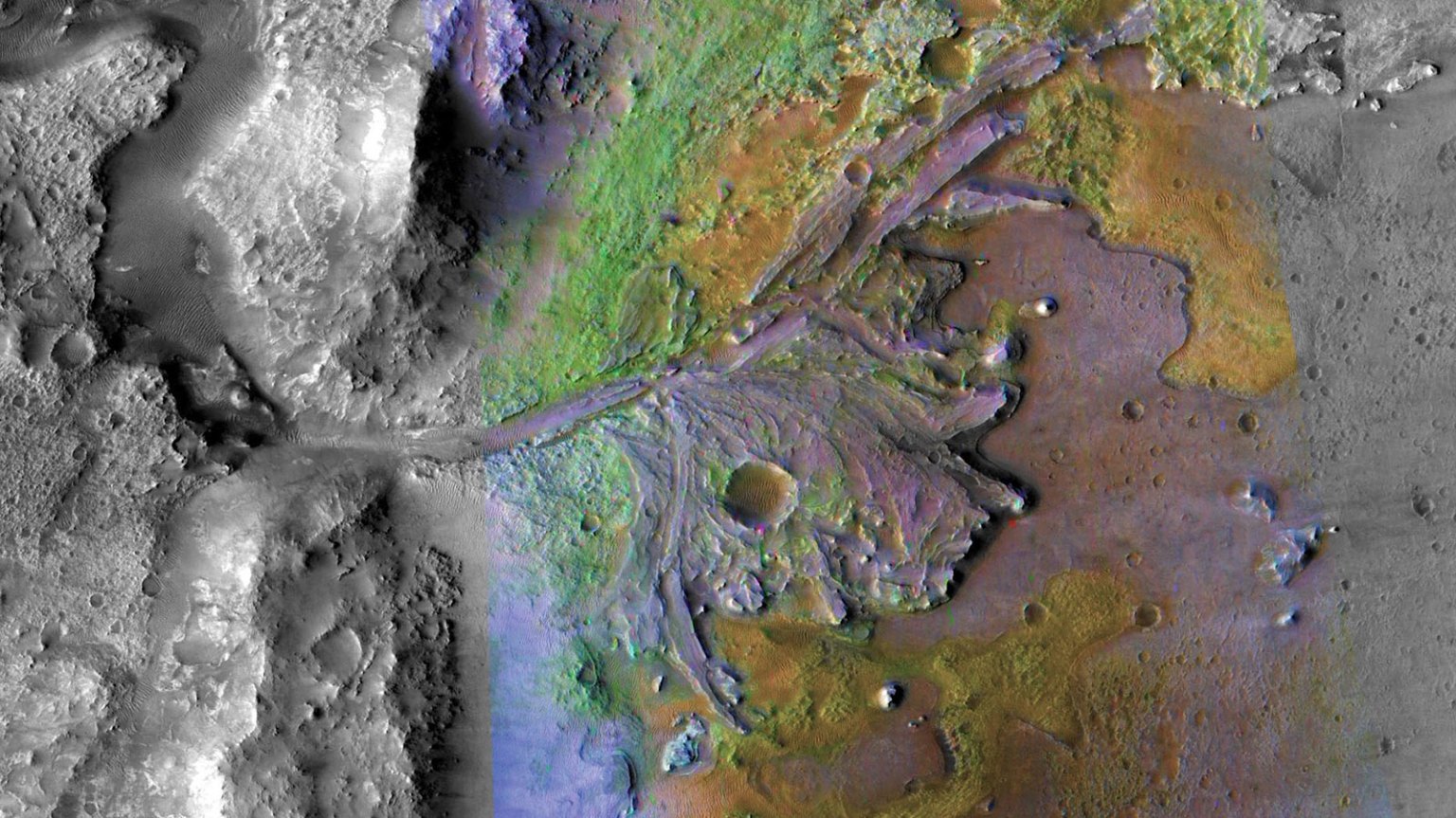
Mars rovers can only make exciting new discoveries thanks to human scientists making careful decisions about their next stop. The Mars 2020 mission is aimed at exploring the geology of Jezero Crater and seeking signs of ancient microbial life on Mars using the Perseverance rover. Scientists at NASA’s Jet Propulsion Laboratory (JPL) in Southern California used novel mapping techniques to direct both the rover and the flights of the Ingenuity helicopter, which rode to Mars on Perseverance — and they did it all with open-source tools.
JPL mapping specialists Dr. Fred Calef III and Dr. Nathan Williams used geospatial analysis to help the scientific community and NASA science leadership select Jezero Crater as the landing site for Perseverance and Ingenuity. Before the vehicles arrived on Mars, they helped create maps of the terrain using data from orbiting satellites.
“Maps and images are a common language between different people — scientists, engineers, and management,” Williams said. “They help make sure everyone’s on the same page moving forward, in a united front to achieve the best science that we can.”
Maps and images are a common language between different people.
Nathan Williams
NASA JPL Geologist and Systems Engineer
After the mission touched down on Mars in February 2021, the Ingenuity helicopter opportunistically scouted ahead to take photos. The team then generated more detailed maps from both rover and helicopter image data to help plan the Perseverance rover’s path and science investigations.
To enable this full-scale mapping of Mars, Calef created the Multi-Mission Geographic Information System (MMGIS), an open-source web-based mapping interface. Online demos of the software, pre-loaded with Mars imagery taken from orbit, allow visitors to explore the paths of Perseverance, Ingenuity, and the Curiosity rover, a sister Mars mission that landed in 2012.
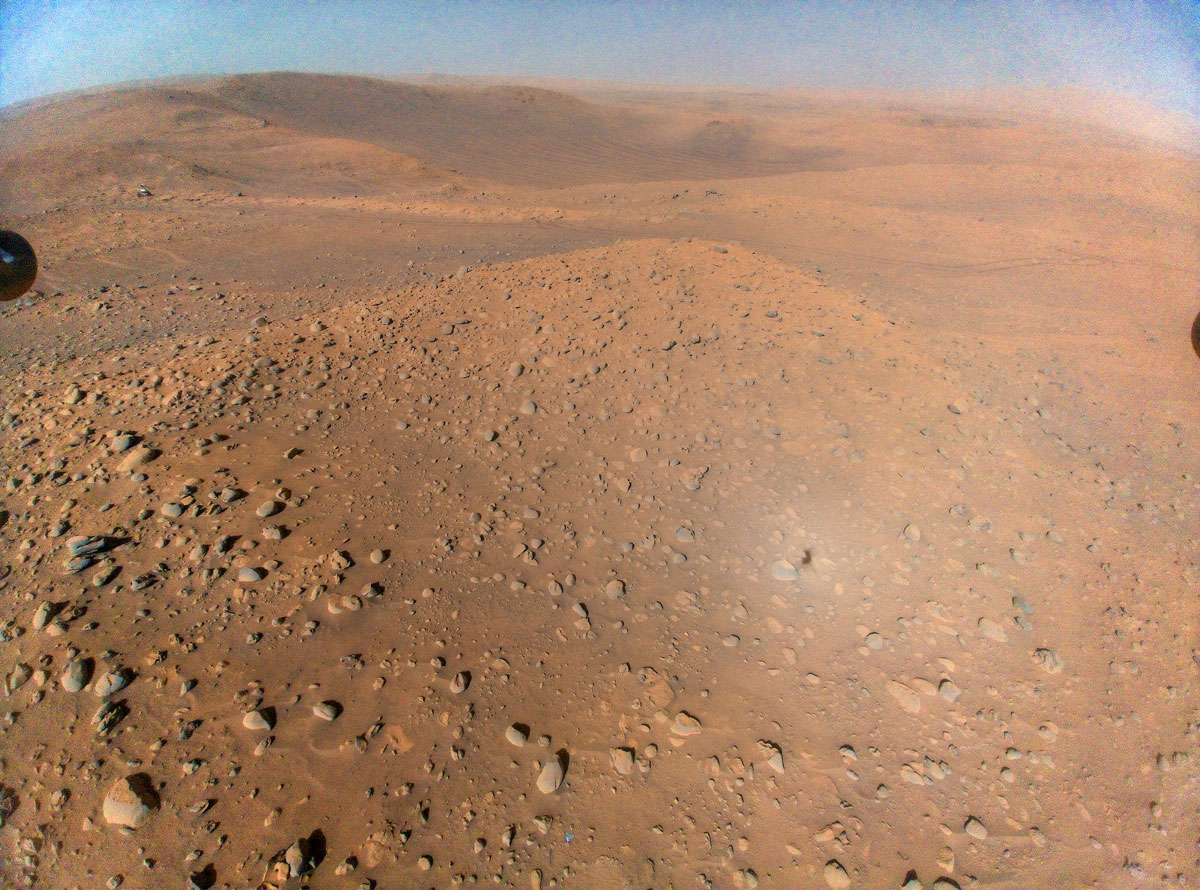
This image of NASA’s Perseverance Mars rover at the rim of Belva Crater was taken by the agency’s Ingenuity Mars Helicopter during the rotorcraft’s 51st flight on April 22, 2023. The rover is in the upper left of the image, parked at a light-toned rocky outcrop.
NASA/JPL-Caltech
The open nature of the software was key to the mission’s success. “We have people literally all over the world who are working on the mission, and we need to be able to give them fast and quick access to software and data,” Calef said.
MMGIS aimed to help people understand the full scope of Martian geography. By combining images from orbit and augmenting with images from Perseverance and Ingenuity, the JPL team allows researchers to zoom in to see individual boulders and zoom out to see all of Mars. This variety of viewpoints gives the team a sense of scale and context to properly understand the landscape around the Perseverance rover, and how to optimally achieve their science goals within the available terrain.
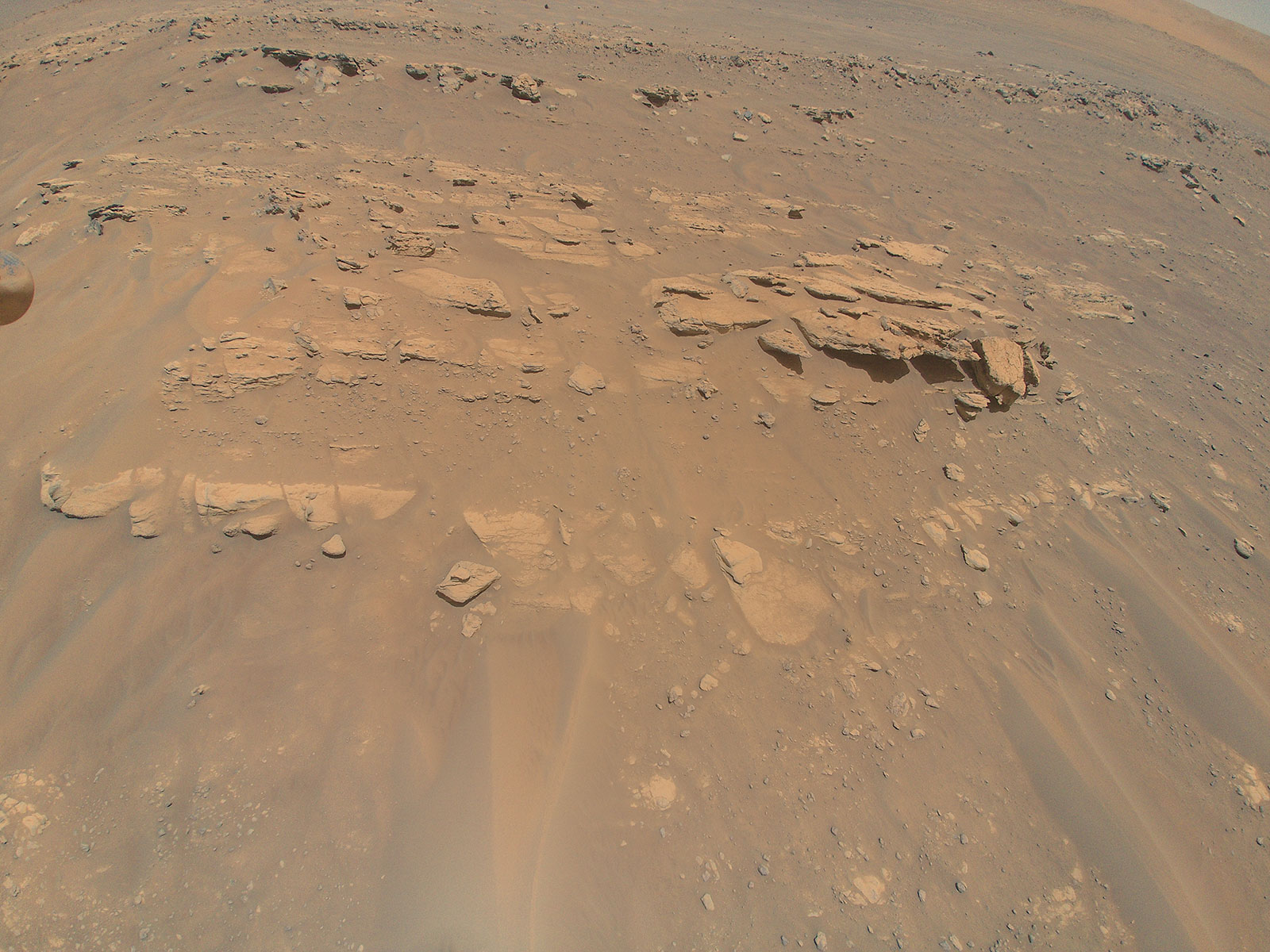
This image of an area the Mars Perseverance rover team calls “Faillefeu” was captured by NASA’s Ingenuity Mars Helicopter during its 13th flight at Mars on Sept. 4, 2021. Images of the geologic feature were taken at the request of the Mars Perseverance rover science team, which was considering visiting the geologic feature during the first science campaign.
NASA/JPL-Caltech
The impact of the tools developed by the JPL team went beyond the Mars 2020 mission. The team wanted their software to help other researchers easily visualize their data without needing to be data visualization experts themselves. Thanks to this open-source approach, other teams have now used MMGIS to map Earth and other planetary bodies.
In keeping with this open philosophy, the images taken by Perseverance and Ingenuity over the course of the Mars 2020 mission are freely available to the public. By sharing these data with the rest of the world, the results from the mission can be used to educate, inspire, and enable further research.
It’s being able to share data between people … getting a higher order of science.
Fred Calef
NASA JPL Geologist and Data Scientist
As Mars scientists look to the future, with the Perseverance rover team deploying even more advanced tools powered by AI, open science will pave the way for further exploration. JPL is now working on designs for potential future Mars helicopters that are far more capable and complex than Ingenuity. Payload mass, flight range, and affordability are at the forefront of their minds.
Existing open-source tools will help address those concerns. Not only are open-source applications free to use, but the large amount of collaboration in creating and testing them means that they’re often highly reliable.
Ultimately, the JPL team views its work as part of the cycle of open science, using open tools to make its job easier while also developing new features in the tools for others to use in the future. “Every mission is contributing back to the other missions and future missions in terms of new tools and techniques to develop,” Calef said. “It’s not just you working on something. It’s being able to share data between people … getting a higher order of science.”
ByLauren Leese Web Content Strategist for the Office of the Chief Science Data Officer
Preparations for Next Moonwalk Simulations Underway (and Underwater)
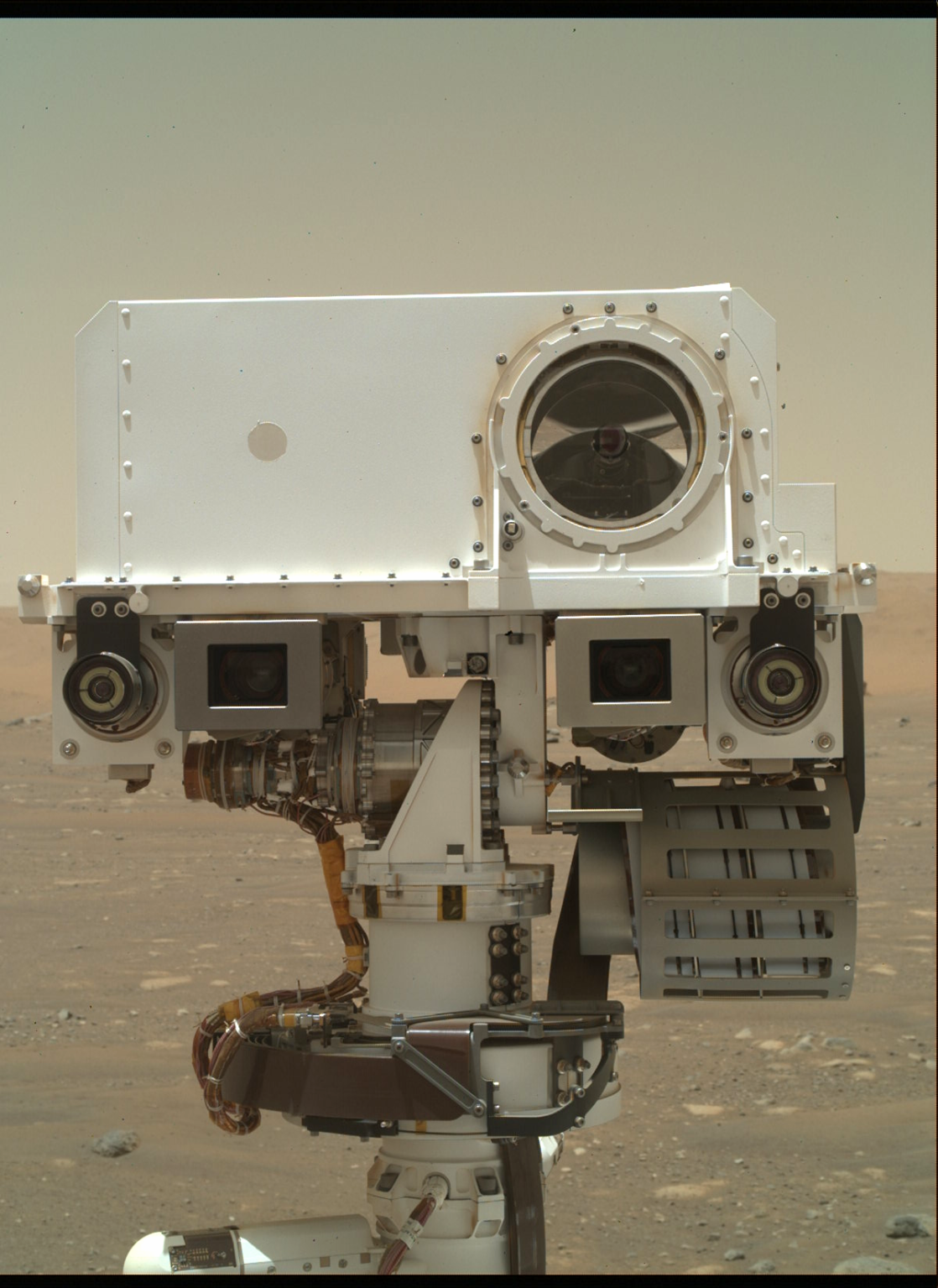
Imagery captured by a navigation camera aboard NASA’s Perseverance rover on Jan. 23 shows the position of a cover on the SHERLOC instrument. The cover had become stuck several weeks earlier but the rover team has since found a way to address the issue so the instrument can continue to operate.
NASA/JPL-Caltech
After six months of effort, an instrument that helps the Mars rover look for potential signs of ancient microbial life has come back online.
The SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals) instrument aboard NASA’s Perseverance Mars rover has analyzed a rock target with its spectrometer and camera for the first time since encountering an issue this past January. The instrument plays a key role in the mission’s search for signs of ancient microbial life on Mars. Engineers at NASA’s Jet Propulsion Laboratory in Southern California confirmed on June 17 that the instrument succeeded in collecting data.
“Six months of running diagnostics, testing, imagery and data analysis, troubleshooting, and retesting couldn’t come with a better conclusion,” said SHERLOC principal investigator Kevin Hand of JPL.
Imagery captured by a navigation camera aboard NASA’s Perseverance rover on Jan. 23 shows the position of a cover on the SHERLOC instrument. The cover had become stuck several weeks earlier but the rover team has since found a way to address the issue so the instrument can continue to operate.
NASA/JPL-Caltech
Mounted on the rover’s robotic arm, SHERLOC uses two cameras and a laser spectrometer to search for organic compounds and minerals in rocks that have been altered in watery environments and may reveal signs of past microbial life. On Jan. 6, a movable lens cover designed to protect the instrument’s spectrometer and one of its cameras from dust became frozen in a position that prevented SHERLOC from collecting data.
Analysis by the SHERLOC team pointed to the malfunction of a small motor responsible for moving the protective lens cover as well as adjusting focus for the spectrometer and the Autofocus and Context Imager (ACI) camera. By testing potential solutions on a duplicate SHERLOC instrument at JPL, the team began a long, meticulous evaluation process to see if, and how, the lens cover could be moved into the open position.
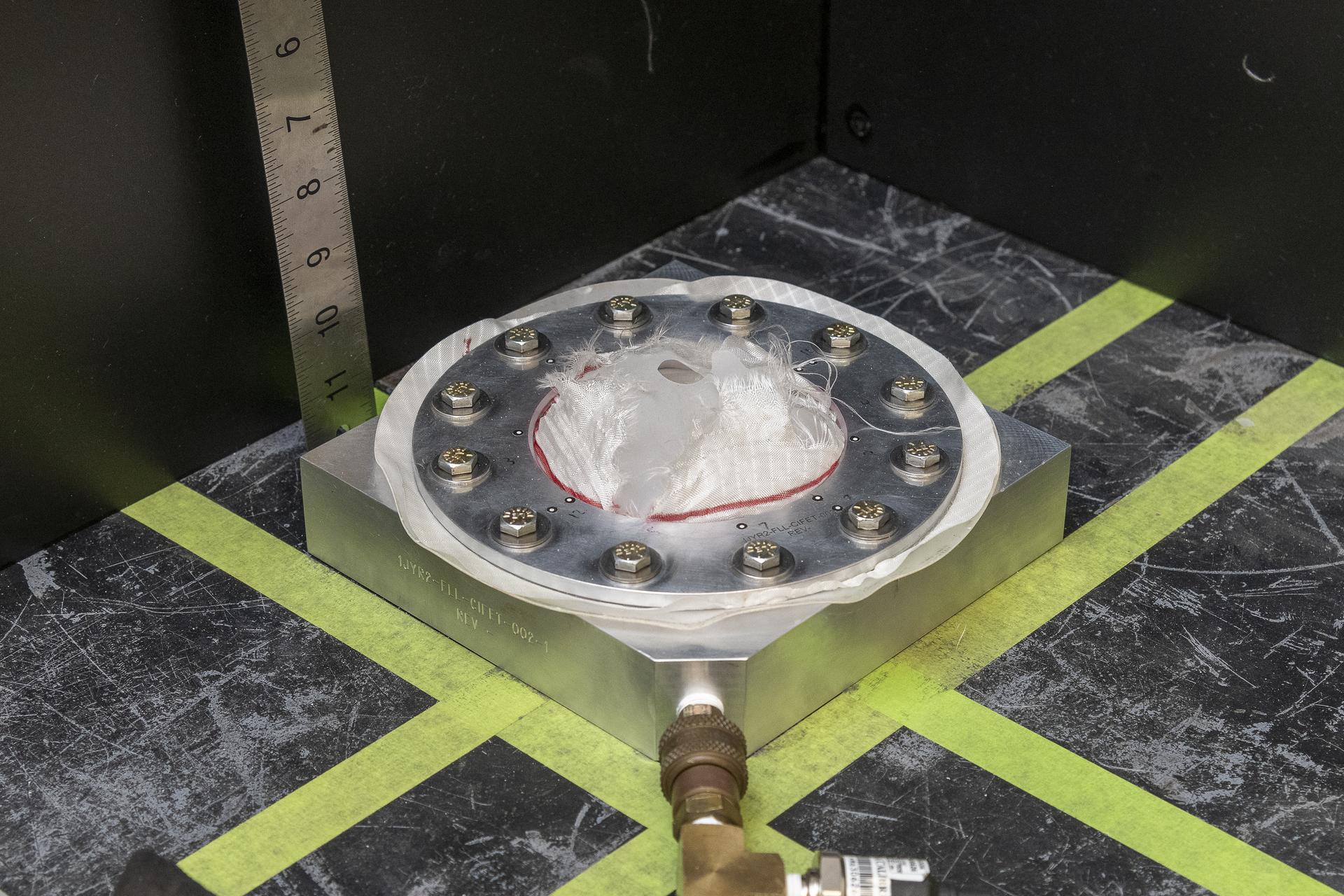
Perseverance’s team used the SHERLOC instrument’s Autofocus and Context Imager to capture this image of its calibration target on May 11 to confirm an issue with a stuck lens cover had been resolved. A silhouette of the fictional detective Sherlock Holmes is at the center of the target.
NASA/JPL-Caltech
SHERLOC Sleuthing
Among many other steps taken, the team tried heating the lens cover’s small motor, commanding the rover’s robotic arm to rotate the SHERLOC instrument under different orientations with supporting Mastcam-Z imagery, rocking the mechanism back and forth to loosen any debris potentially jamming the lens cover, and even engaging the rover’s percussive drill to try jostling it loose. On March 3, imagery returned from Perseverance showed that the ACI cover had opened more than 180 degrees, clearing the imager’s field of view and enabling the ACI to be placed near its target.
“With the cover out of the way, a line of sight for the spectrometer and camera was established. We were halfway there,” said Kyle Uckert, SHERLOC deputy principal investigator at JPL. “We still needed a way to focus the instrument on a target. Without focus, SHERLOC images would be blurry and the spectral signal would be weak.”
Like any good ophthalmologist, the team set about figuring out SHERLOC’s prescription. Since they couldn’t adjust the focus of the instrument’s optics, they relied on the rover’s robotic arm to make minute adjustments in the distance between SHERLOC and its target in order to get the best image resolution. SHERLOC was commanded to take pictures of its calibration target so that the team could check the effectiveness of this approach.
This image of NASA’s Perseverance rover gathering data on the “Walhalla Glades” abrasion was taken in the “Bright Angel” region of Jezero Crater by one of the rover’s front hazard avoidance cameras on June 14. The WATSON camera on the SHERLOC instrument is closest to the Martian surface.
NASA/JPL-Caltech
“The rover’s robotic arm is amazing. It can be commanded in small, quarter-millimeter steps to help us evaluate SHERLOC’s new focus position, and it can place SHERLOC with high accuracy on a target,” said Uckert. “After testing first on Earth and then on Mars, we figured out the best distance for the robotic arm to place SHERLOC is about 40 millimeters,” or 1.58 inches. “At that distance, the data we collect should be as good as ever.”
Confirmation of that fine positioning of the ACI on a Martian rock target came down on May 20. The verification on June 17 that the spectrometer is also functional checked the team’s last box, confirming that SHERLOC is operational.
“Mars is hard, and bringing instruments back from the brink is even harder,” said Perseverance project manager Art Thompson of JPL. “But the team never gave up. With SHERLOC back online, we’re continuing our explorations and sample collection with a full complement of science instruments.”
Perseverance is in the later stages of its fourth science campaign, looking for evidence of carbonate and olivine deposits in the “Margin Unit,” an area along the inside of Jezero Crater’s rim. On Earth, carbonates typically form in the shallows of freshwater or alkaline lakes. It’s hypothesized that this also might be the case for the Margin Unit, which formed over 3 billion years ago.
More About the Mission
A key objective of Perseverance’s mission on Mars is astrobiology, including caching samples that may contain signs of ancient microbial life. The rover will characterize the planet’s geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith.
Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis.
The Mars 2020 Perseverance mission is part of NASA’s Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet.
NASA’s Jet Propulsion Laboratory, which is managed for the agency by Caltech, built and manages operations of the Perseverance rover.
Surprising Phosphate Finding in NASA’s OSIRIS-REx Asteroid Sample
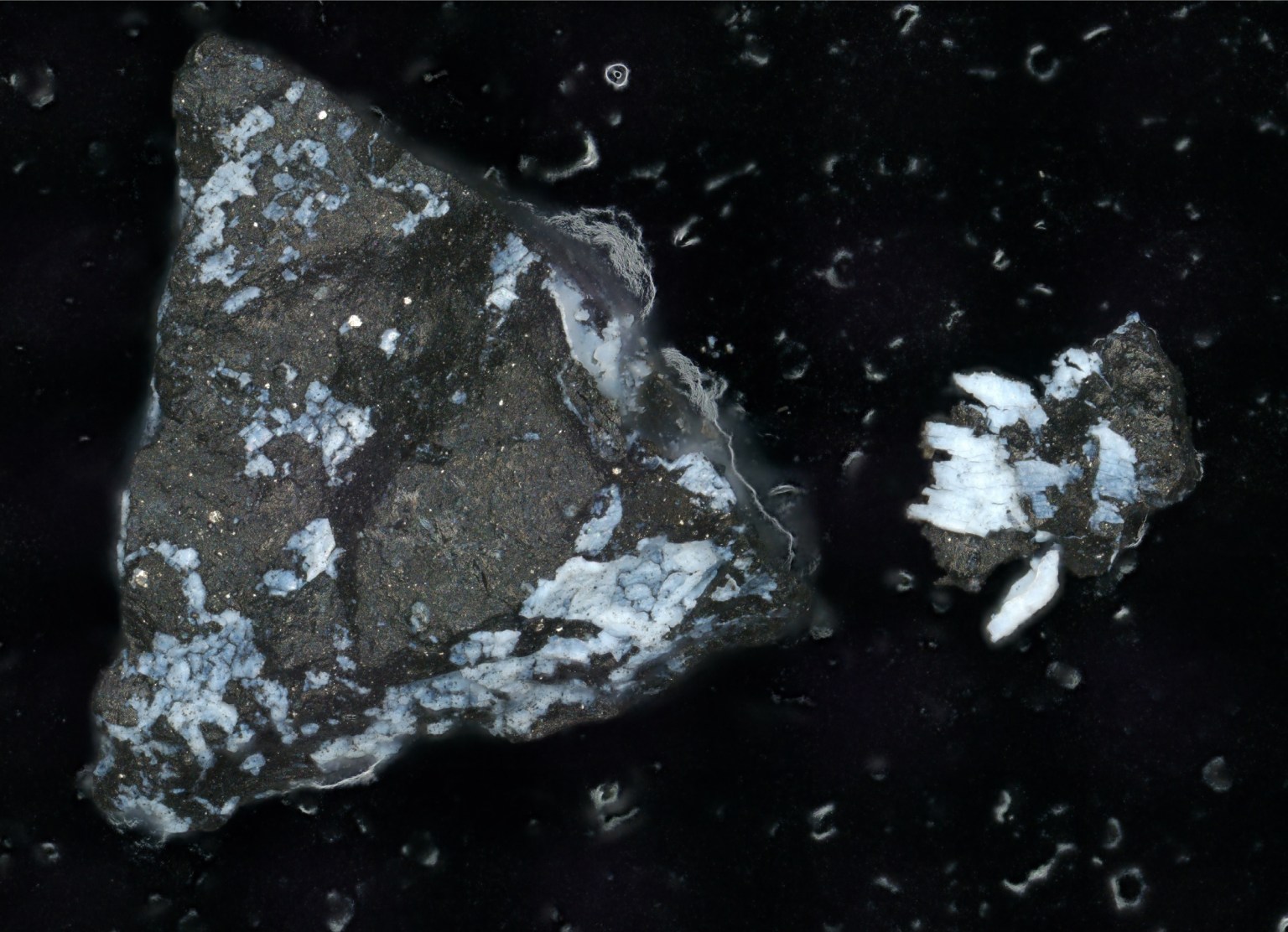
A microscope image of a dark Bennu particle, about a millimeter long, with a crust of bright phosphate. To the right is a smaller fragment that broke off.
Early analysis of the asteroid Bennu sample returned by NASA’s OSIRIS-REx mission has revealed dust rich in carbon, nitrogen, and organic compounds, all of which are essential components for life as we know it. Dominated by clay minerals, particularly serpentine, the sample mirrors the type of rock found at mid-ocean ridges on Earth.
The magnesium-sodium phosphate found in the sample hints that the asteroid could have splintered off from an ancient, small, primitive ocean world. The phosphate was a surprise to the team because the mineral had not been detected by the OSIRIS-REx spacecraft while at Bennu.
While a similar phosphate was found in the asteroid Ryugu sample delivered by JAXA’s (Japan Aerospace Exploration Agency) Hayabusa2 mission in 2020, the magnesium-sodium phosphate detected in the Bennu sample stands out for its purity (that is, the lack of other materials included in the mineral) and the size of its grains, unprecedented in any meteorite sample.
Scientists have eagerly awaited the opportunity to dig into the 4.3-ounce (121.6-gram) pristine asteroid Bennu sample collected by NASA’s OSIRIS-REx (Origins, Spectral Interpretation, Resource Identification, and Security – Regolith Explorer) mission since it was delivered to Earth last fall. They hoped the material would hold secrets of the solar system’s past and the prebiotic chemistry that might have led to the origin of life on Earth. An early analysis of the Bennu sample, published June 26 in Meteoritics & Planetary Science, demonstrates this excitement was warranted.
The OSIRIS-REx Sample Analysis Team found that Bennu contains the original ingredients that formed our solar system. The asteroid’s dust is rich in carbon and nitrogen, as well as organic compounds, all of which are essential components for life as we know it. The sample also contains magnesium-sodium phosphate, which was a surprise to the research team, because it wasn’t seen in the remote sensing data collected by the spacecraft at Bennu. Its presence in the sample hints that the asteroid could have splintered off from a long-gone, tiny, primitive ocean world.
A Phosphate Surprise
Analysis of the Bennu sample unveiled intriguing insights into the asteroid’s composition. Dominated by clay minerals, particularly serpentine, the sample mirrors the type of rock found at mid-ocean ridges on Earth, where material from the mantle, the layer beneath Earth’s crust, encounters water.
This interaction doesn’t just result in clay formation; it also gives rise to a variety of minerals like carbonates, iron oxides, and iron sulfides. But the most unexpected discovery is the presence of water-soluble phosphates. These compounds are components of biochemistry for all known life on Earth today.
A tiny fraction of the asteroid Bennu sample returned by NASA’s OSIRIS-REx mission, shown in microscope images. The top-left pane shows a dark Bennu particle, about a millimeter long, with an outer crust of bright phosphate. The other three panels show progressively zoomed-in views of a fragment of the particle that split off along a bright vein containing phosphate, captured by a scanning electron microscope.
From Lauretta & Connolly et al. (2024) Meteoritics & Planetary Science, doi:10.1111/maps.14227.
While a similar phosphate was found in the asteroid Ryugu sample delivered by JAXA’s (Japan Aerospace Exploration Agency) Hayabusa2 mission in 2020, the magnesium-sodium phosphate detected in the Bennu sample stands out for its purity — that is, the lack of other materials in the mineral — and the size of its grains, unprecedented in any meteorite sample.
The finding of magnesium-sodium phosphates in the Bennu sample raises questions about the geochemical processes that concentrated these elements and provides valuable clues about Bennu’s historic conditions.
“The presence and state of phosphates, along with other elements and compounds on Bennu, suggest a watery past for the asteroid,” said Dante Lauretta, co-lead author of the paper and principal investigator for OSIRIS-REx at the University of Arizona, Tucson. “Bennu potentially could have once been part of a wetter world. Although, this hypothesis requires further investigation.”
“OSIRIS-REx gave us exactly what we hoped: a large pristine asteroid sample rich in nitrogen and carbon from a formerly wet world,” said Jason Dworkin, a co-author on the paper and the OSIRIS-REx project scientist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland.
From a Young Solar System
Despite its possible history of interaction with water, Bennu remains a chemically primitive asteroid, with elemental proportions closely resembling those of the Sun.
“The sample we returned is the largest reservoir of unaltered asteroid material on Earth right now,” said Lauretta.
This composition offers a glimpse into the early days of our solar system, over 4.5 billion years ago. These rocks have retained their original state, having neither melted nor resolidified since their inception, affirming their ancient origins.
Hints at Life’s Building Blocks
The team has confirmed the asteroid is rich in carbon and nitrogen. These elements are crucial in understanding the environments where Bennu’s materials originated and the chemical processes that transformed simple elements into complex molecules, potentially laying the groundwork for life on Earth.
“These findings underscore the importance of collecting and studying material from asteroids like Bennu — especially low-density material that would typically burn up upon entering Earth’s atmosphere,” said Lauretta. “This material holds the key to unraveling the intricate processes of solar system formation and the prebiotic chemistry that could have contributed to life emerging on Earth.”
What’s Next
Dozens more labs in the United States and around the world will receive portions of the Bennu sample from NASA’s Johnson Space Center in Houston in the coming months, and many more scientific papers describing analyses of the Bennu sample are expected in the next few years from the OSIRIS-REx Sample Analysis Team.
“The Bennu samples are tantalizingly beautiful extraterrestrial rocks,” said Harold Connolly, co-lead author on the paper and OSIRIS-REx mission sample scientist at Rowan University in Glassboro, New Jersey. “Each week, analysis by the OSIRIS-REx Sample Analysis Team provides new and sometimes surprising findings that are helping place important constraints on the origin and evolution of Earth-like planets.”
Launched on Sept. 8, 2016, the OSIRIS-REx spacecraft traveled to near-Earth asteroid Bennu and collected a sample of rocks and dust from the surface. OSIRIS-REx, the first U.S. mission to collect a sample from an asteroid, delivered the sample to Earth on Sept. 24, 2023.
NASA’s Goddard Space Flight Center in Greenbelt, Maryland, provided overall mission management, systems engineering, and the safety and mission assurance for OSIRIS-REx. Dante Lauretta of the University of Arizona, Tucson, is the principal investigator. The university leads the science team and the mission’s science observation planning and data processing. Lockheed Martin Space in Littleton, Colorado, built the spacecraft and provided flight operations. Goddard and KinetX Aerospace were responsible for navigating the OSIRIS-REx spacecraft. Curation for OSIRIS-REx takes place at NASA Johnson. International partnerships on this mission include the OSIRIS-REx Laser Altimeter instrument from CSA (Canadian Space Agency) and asteroid sample science collaboration with JAXA’s Hayabusa2 mission. OSIRIS-REx is the third mission in NASA’s New Frontiers Program, managed by NASA’s Marshall Space Flight Center in Huntsville, Alabama, for the agency’s Science Mission Directorate in Washington.
Find more information about NASA’s OSIRIS-REx mission at:
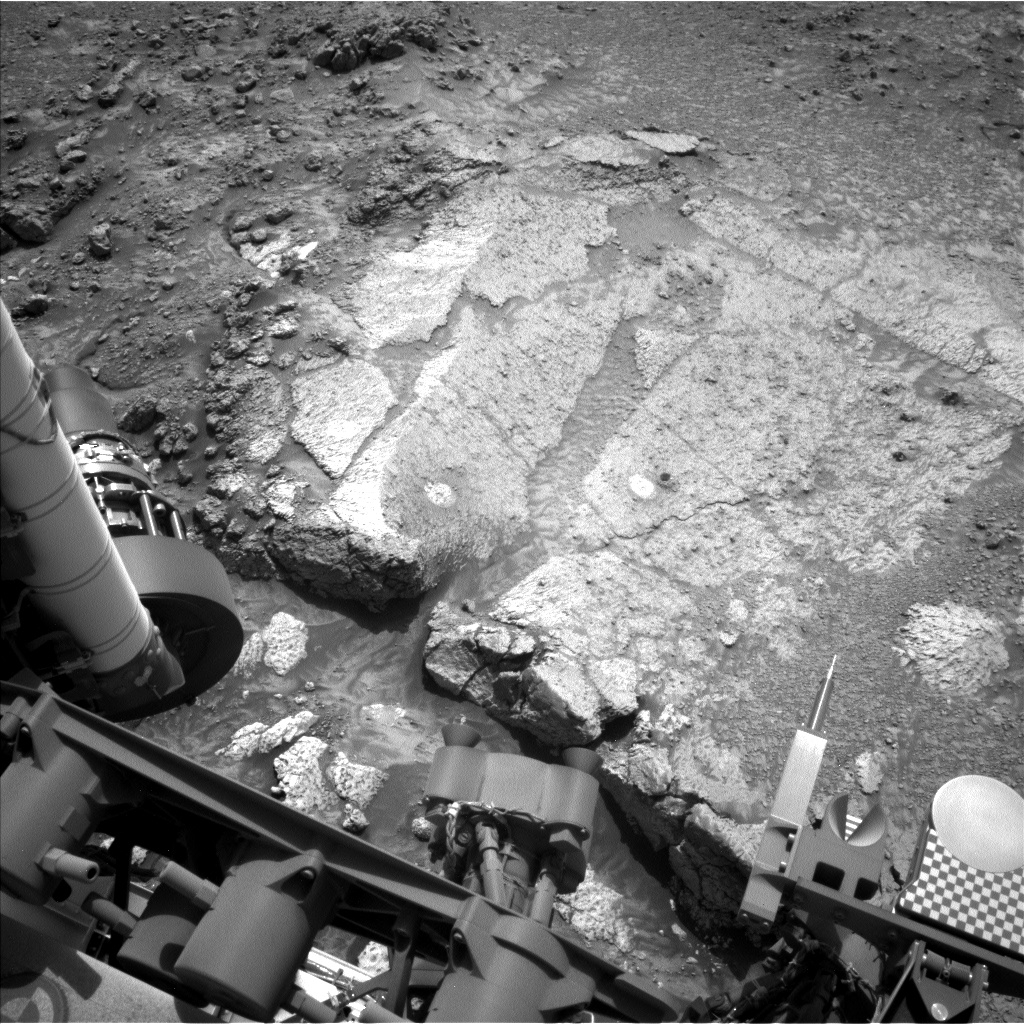
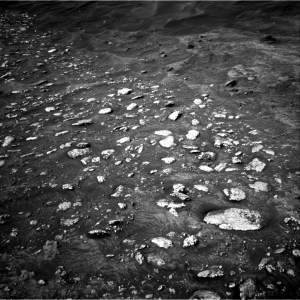
This image was taken by Left Navigation Camera onboard NASA’s Mars rover Curiosity on Sol 4219 (2024-06-19 02:21:53 UTC).
NASA/JPL-Caltech
Earth planning date: Monday, June 24, 2024
This will be an important week for chemistry on our latest drill sample “Mammoth Lakes 2.” Curiosity’s primary goal today was a preconditioning of the SAM instrument in preparation for its chemical analysis. Due to the large amounts of power required by SAM, today’s science block was limited to one hour, although it grew a bit at the cost of next sol’s science allocation. Today’s planning only covers one sol (4225), as our usual Wednesday planning day will not have Deep Space Network availability. We will plan 3 sols on Tuesday as a result.
Over the weekend, the “Mammoth Lakes 2” drill sample was dropped off to CheMin for analysis. Mastcam change detection observations of “Walker Pass 2” and “Finch Lake” were begun and will complete on Sol 4225. Remote science on “Whitebark Pass,” “Quarry Peak,” “Broken Finger Peak,” and “Shout of Relief Pass” completed successfully. On Sol 4225, the focus for remote science was a ChemCam laser spectroscopic characterization and Mastcam imaging of “Horsetail Falls,” an area near the edge of the “Whitebark Pass” workspace slab. The Navcam image below shows the rough surface of “Horsetail Falls” as a stripe of dark rubbly material near the top just right of center edge of the light colored “Whitebark Pass” slab. “Horsetail Falls” is an example of bedrock texture diversity. This target is named for an iconic 270 ft waterfall emerging from Agnew Lake and easily seen from the June Lake Loop road. “Shout of Relief Pass” honors the 11000 ft pass on the Sierra High Route trail which is a gateway to much easier terrain for the next 25 miles of the trail. All targets in this area of Mount Sharp are named after the Bishop geological quadrangle in the High Sierra and Owens Valley of California. ChemCam RMI will also image an 11×1 mosaic of the nearby channel floor where there are interesting color variations. Atmospheric observations in this science block consist of a dust devil survey. In the next plan, SAM will complete its initial analysis. Based on the SAM and CheMin results, the team will then decide whether to do more chemistry at this intriguing location or continue our drive up Mount Sharp.
Written by Deborah Padgett, Curiosity Operations Product Generation Subsystem Lead Engineer at NASA’s Jet Propulsion Laboratory